Hintergrundwissen zu OBD2
Ende der achtziger Jahre beschloss der US Bundesstaat Kalifornien schärfere Emmisionswert- Richtlinien einzuführen, um die Schadstoffbelastungen der großen Ballungszentren in den Griff zu bekommen. Dazu sollten die Fahrzeuge alle Emmisionsrelevanten Funktionsgruppen selbst überwachen können. Abweichungen wie z.B. defekte Lamdasonden, (die eine Veränderung des Abgasgemisches zur Folge hätten) werden von den Steuergerät/en (ECU) im Fahrzeug erkannt, gespeichert, und dem Fahrer durch eine gelbe Motorstörungslampe (MIL) Bild 2.1 im Schalttafeleinsatz angezeigt.

Um die Fehlerursache für den Defekt zu erfahren kann man bei einigen älteren Fahrzeugen im Diagnosestecker 2 Pins miteinander verbinden, danach blinkt die MIL, mehrmals in einem bestimmten Rhythmus. Der passende Fehlercode und die Beschreibung dazu, kann man den Herstellerunterlagen oder dem Fahrzeughandbuch entnehmen. Das Beispiel bezieht sich auf den Opel Kadett E BJ 1991 mit dem ich das auch praktisch testen konnte. Nachteilig dabei ist, dass jeder Fahrzeughersteller sein eigenes Süppchen kochte, und die Diagnose für den "kleinen Privatmann" nicht immer so einfach, bei jedem Fahrzeug anwendbar ist. Die Folge davon, man musste den Fehler durch eine Werkstatt auslesen und beheben lassen.
Dieses System der frühen Onboard-Diagnostik wurde wegen der immer noch zu hohen Umweltverschmutzungen und ständig zunehmender Elektronik im KFZ nachgebessert.
1996 war es so weit, ein neuer Diagnosestandard wurde Pflicht für alle neu zugelassenen Fahrzeuge in den USA. Spätestens jetzt konnte man nicht mehr so einfach, wie im Bsp. mit nur einer Verbindungsbrücke im Diagnosestecker sich den Fehler als Blinkcode anzeigen lassen. Es wurden jedoch Normen erlassen, die es externen Diagnosegeräten (Offboard-Diagnose) ermöglichen, an alle wichtigen abgasrelevanten Fahrzeuginformationen wie Sensordaten und im Fehlerfall,
abgespeicherte Fehler über den Diagnosestecker im Fahrzeug auszulesen.
Die OnBoard Diagnose der 2ten Generation, kurz OBD2 wurde geboren.
Die Norm SAE J1979 beschreibt z.B. wie externe Diagnosegeräte Sensorwerte und den Fehlerspeicher der ECU(s) auslesen und bei Wunsch rücksetzen können.
Für die in Europa zugelassenen PKW's übernahm man diese Regelung und verfasste eine Norm, ISO 15031-5 gleichbedeutend der SAE J1979. PKW's mit Ottomotor müssen seit 2001 OBD2 kompatibel sein, PKW's mit Dieselmotor erst ab 2004. Häufig findet man auch andere Abkürzungen die aber dennoch die gleiche Bedeutung haben. Folgende Bezeichnungen sind zulässig:
| OBD2 | On Bord Diagnose der 2ten Generation. (verwenden überwiegend Amerikanische Fahrzeughersteller) |
| EOBD | European On Bord Diagnose (wie der Name schon sagt wird er überwiegend von Europäischen Fahrzeugherstellern verwendet) |
| JOBD | Japan On Bord Diagnose |
Für die oben genannten Einführungsjahre gibt es jedoch Ausnahmen.
So können einige Fahrzeuge die nach 1996 in Amerika hergestellt wurden (einige Opels, bekanntlich von GM), aber in Europa schon vor 2001 zugelassen wurden OBD2 fähig sein.
Wenn im Fahrzeugschein mindestens Schadstoffklasse 3 und EOBD vermerkt sind kann man sicher sein, dass das Fahrzeug OBD2 kompatibel ist.
Zur Diagnose stehen 9 so genannte Generic Modi zur Verfügung.
| Mode | Bedeutung |
| 1 | Zeigt die aktuellen Daten/Sensorwerte |
| 2 | Zeigt die freeze Frame Daten |
| 3 | Zeigt gesetzte Fehlercodes |
| 4 | Löscht den Fehlerspeicher |
| 5 | Zeigt Selbsttest-Resultate der Lambdasonden |
| 6 | Selbsttest-Resultate nicht kontinuierlich überwachter Systeme |
| 7 | Fehlercodes kontinuierlich überwachter Systeme |
| 8 | Spezieller Kontrollmodus |
| 9 | Fahrzeuginformationen wie z.B. VIN (Fahrzeug SN.) |
Einige dieser Modi verwenden zusätzlich so genannte PID's (ParameterInDentification) Sie verkörpern die einzelnen Sensoren, die bei Bedarf ausgelesen werden können.
Die Norm enthält PID's bis 4Fh.
Da diese Tabelle allgemein gültig für alle OBD2 kompatiblen Fahrzeuge verfasst worden ist, wird nicht jeder PID von jedem Fahrzeug unterstützt. So werden in einem Fahrzeug mit Dieselmotor andere Sensoren als in einem Fahrzeug mit Otto Motor verbaut. Daher ließ man als erstes den PID 0 aus. Dieser repräsentiert alle vorhandenen PID's von 1 - 20h. In PID 20 stehen wiederum die unterstützten PID's von 21 - 40h. Wenn uns z.B. die Fahrzeuggeschwindigkeit interessiert, geschieht dies über Mode 1 (für die Echtzeitdaten) und dem PID 0d für die Geschwindigkeit.
Falls während der Autofahrt oder zumindest bei laufendem Motor ein Fehler erkannt wird, werden ein oder mehrere Fehlercodes erzeugt, die wir dann mit dem Mode 3 abfragen können. Wenn wir nach einer Reparatur den Fehlerspeicher und somit die MIL zurücksetzen möchten, erfolgt dies über Mode 4.
Diese 9 Generic Modi bilden die gemeinsame Grundlage für alle OBD2 kompatiblen Fahrzeuge.
Das Protokoll mit dem die Daten übermittelt werden Ist jedoch Fahrzeug abhängig. Dies kommt daher, das bis zur Einführung jeder Fahrzeug-Konzern für seine Bord-Elektronik eigene Standards verwendete.
Man einigte sich auf vier unterschiedliche Übertragungsprotokolle, wovon eines für die OBD2 konformen Daten verwenden muss.
Als Anhaltswert kann man sagen, das amerikanische Fahrzeuge meistens das J1850 VPW und J1850 PWM Protokoll nutzen. asiatische und europäische Fahrzeuge meist das ISO 9141-2 und KWP 2000. Aktuellere Modelle wie z.B. der Golf 5 verwenden schon das ISO 15765 (CAN) Protokoll.
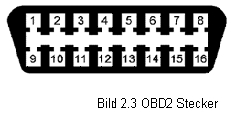
In Bild 2.3 sehen sie den Diagnosestecker der bei jedem Fahrzeug welches den OBD2 Standard unterstützt gleich auszusehen hat. Des Weiteren wurde festgelegt
dass er sich maximal einen Meter entfernt vom Fahrersitz befinden darf. Die Norm SAE-J1962 beschreibt diese Regelungen.
In der Tabelle 2.1 sehen sie einen Überblick über die Protokolle und die Pins die zur Datenübertragung genutzt werden. Pins die in der Tabelle nicht aufgeführt wurden, sind für herstellerspezifische Anwendungen reserviert.
| OBD2-Protokoll | Protokollvarianten | UB 12 Volt | GND | Signal |
| ISO 9141-2 | KW 0808 | 16 | 4 + 5 | 7 + *15 |
| - | KW 9494 | 16 | 4 + 5 | 7 + *15 |
| ISO 14230-4 | KWP2000 fast init | 16 | 4 + 5 | 7 |
| - | KWP2000 slow init | 16 | 4 + 5 | 7 |
| SAE J1850 | PWM | 16 | 4 + 5 | 2 + 10 |
| SAE J1850 | VPW | 16 | 4 + 5 | 2 |
| ISO 15765-4 (CAN Bus) | CAN 11 ident 250 KB | 16 | 4 + 5 | 6 + 14 |
| - | CAN 11 ident 500 KB | 16 | 4 + 5 | 6 + 14 |
| - | CAN 29 ident 250 KB | 16 | 4 + 5 | 6 + 14 |
| - | CAN 29 ident 500 KB | 16 | 4 + 5 | 6 + 14 |
In der Tabelle sehen wir, dass es bei einigen Protokollen unterschiedliche Varianten gibt.
Bei dem ISO 9142-2 Protokoll handelt es sich um ein serielles Protokoll (nicht zu verwechseln mit RS232). Die eigentliche Kommunikation findet auf Pin 7 (K-Line) statt. Bei den meisten neueren Fahrzeugen wird die Initialisierung auch über Pin 7 eingeleitet, Somit entfällt Pin 15. Diagnosegeräte sollten wegen der Kompatibilität zu beiden Typen Pin 7 und 15 unterstützen.
Bei Verwendung eines der ISO 9141-2 oder der ISO 14230-4 Protokolle spricht man gewöhnlich auch von K-Line Diagnose, da die ganze Kommunikation über nur eine Leitung (K-Line) abläuft.
In den folgenden Kapiteln wurden öfters die genormten Abkürzungen bzw. manche technische Begriffe, die ich aus den Datenblättern so übernommen habe, verwendet.
Einige wichtige Abkürzungen bzw. Begriffe wurden in der Tabelle 2.4 zusammengefasst:
| Abkürzung | English | Beschreibung |
| DTC | diagnostic trouble code | Fahrzeugfehler |
| ECU | elektronic controll unit | allg. Begriff für ein Steuergerät |
| MIL | malfunction indicator lamp | Fehlerlampe (Motorleuchte) |
| OBD2 | on-board diagnostics (2nd generation) | Onboarddiagnose der 2ten Generation |
| PID | parameter indentification | Funktionale OBD2-Adressierung |
| - | Frame | Datenrahmen (Datagramm) |
| - | Request | Anforderung |
| - | Response | Antwort |
| - | message | Nachricht |